Beschreibung
Der Decoder verfügt über 8 Ausgänge zur Steuerung von Servomotoren.
Technische Daten des MultiServo8x
- Betriebsspannung 10V..24V AC oder 10..30V DC
- Steuerspannung JK-Signal
- 8 x 3-polige Ausgangsstecker
- Ansteuerzeit der Ausgänge einstellbar von 1 ms- 65,5 s (im Raster 1 ms) oder statisch
- Einstellung des Startzustandes: immer aus, immer ein, letzter Zustand (Einstellung über PC)
- 1 Status LED für jeden Ausgang
- 1 Status LED zur Anzeige von verschiedenen Betriebszuständen
B. JK-Bus OK, Run, Programmiermodus, Versorgungsspannung - Taster für Bedienung
- Federkraftklemmen ohne Schrauben für Querschnitte von 0,2 mm2 bis 1,5 mm2 für DCC/MM-Signal und Versorgung
- Befestigungslöcher für Direktmontage oder passgenau für Phoenix UMK-Hutschiene
- alle wichtigen Bauelemente auf der Unterseite der Platine (Kurzschlussvermeidung)
- RS 232 Schnittstelle zur Parametrisierung über PC – optoentkoppelt
- Adressvergabe, Forcen der Ausgänge für Testzwecke ohne Leitungen abzuklemmen o. Ä., Projektmanagement mit Vergabe von Modulnamen und Beschreibungen für jeden Ausgang über PC (kostenlose Software)
- Daten werden im Flash gespeichert, kein Akku
- 32 Bit CPU mit Seriennummer
- Abmessung 72 mm x 43 mm
- Die Einstellung der Grundparameter (Adressen, Geschwindigkeit und Positionen) ist selbstverständlich über jede Zentrale möglich.
Unser Decoder bietet jedoch eine Reihe von weiten Features. Die Einstellung dieser erweiterten Funktionen können nur über einen PC mit einem Konfigurationskabel vorgenommen werden. (Nach- und Zurückwippen, Verzögerungen, Abschaltautomatik usw.) Das Kabel kann zur Konfiguration für alle unsere Decoder oder Rückmelder verwendet werden und ist damit eine einmalige Investition. Die Einstellungen werden damit jedoch enorm vereinfacht!
Anschluss des Decoders
Führen Sie alle Anschlussarbeiten nur bei ausgeschalteter Spannung durch!
Anschluss an die Zentrale
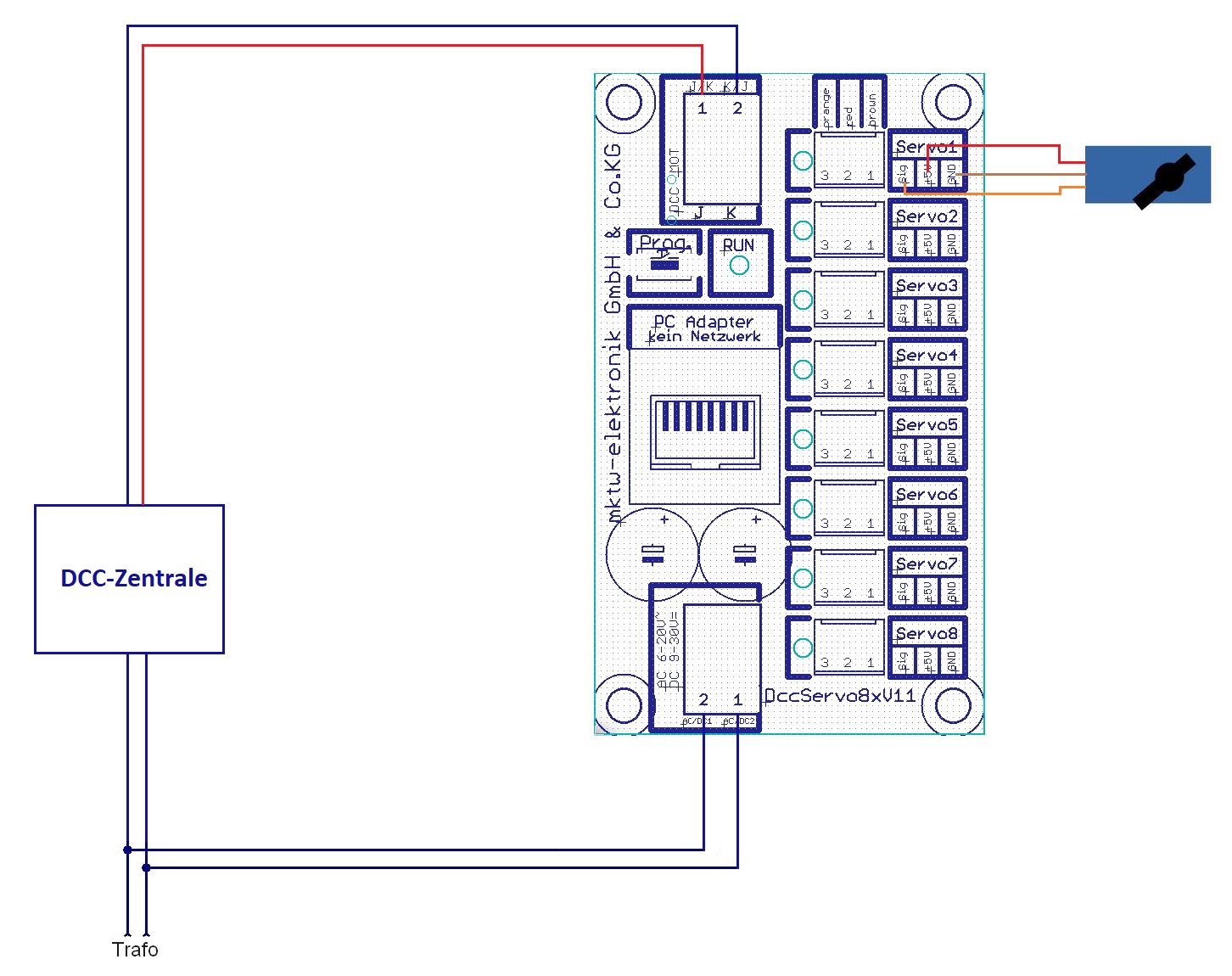
Für die Funktion des Decoders ist der Anschluss an die Versorgungsspannung und Fahrspannung (J, K) notwendig.
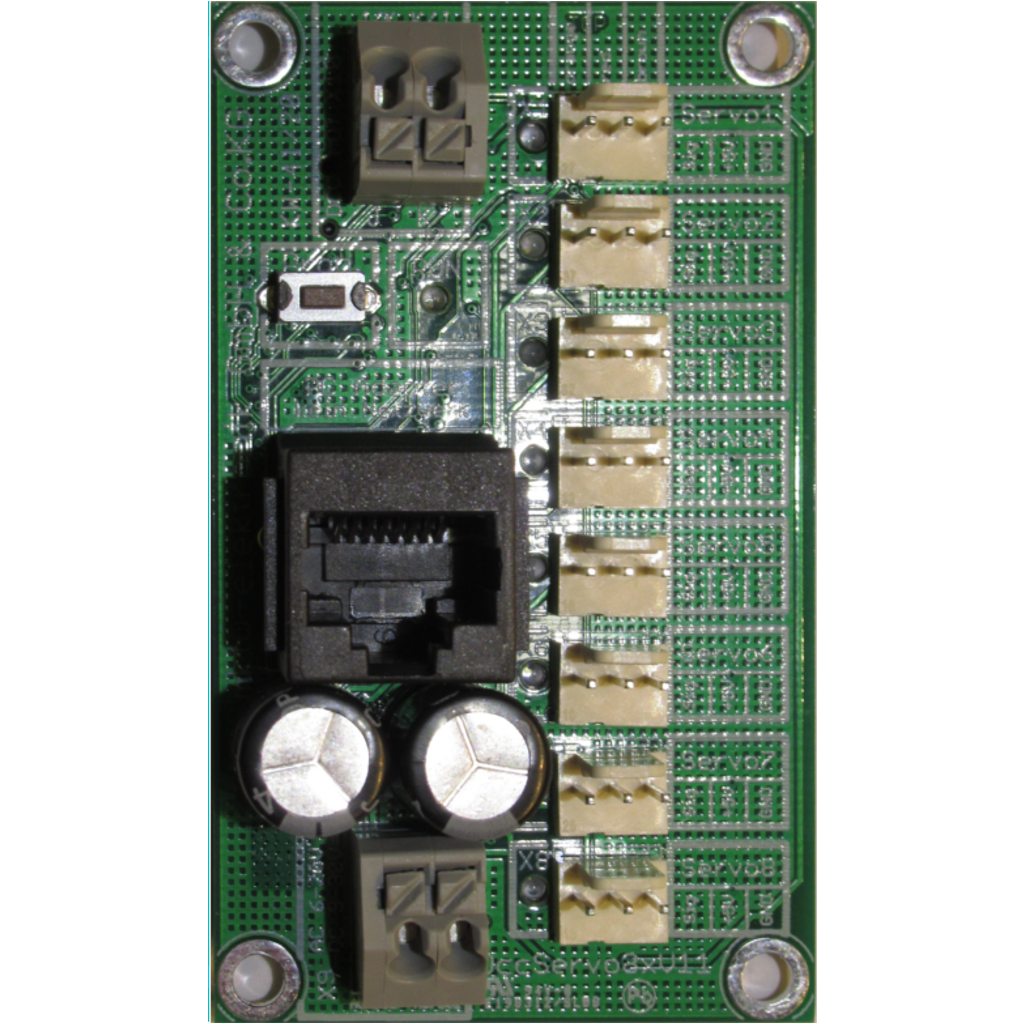
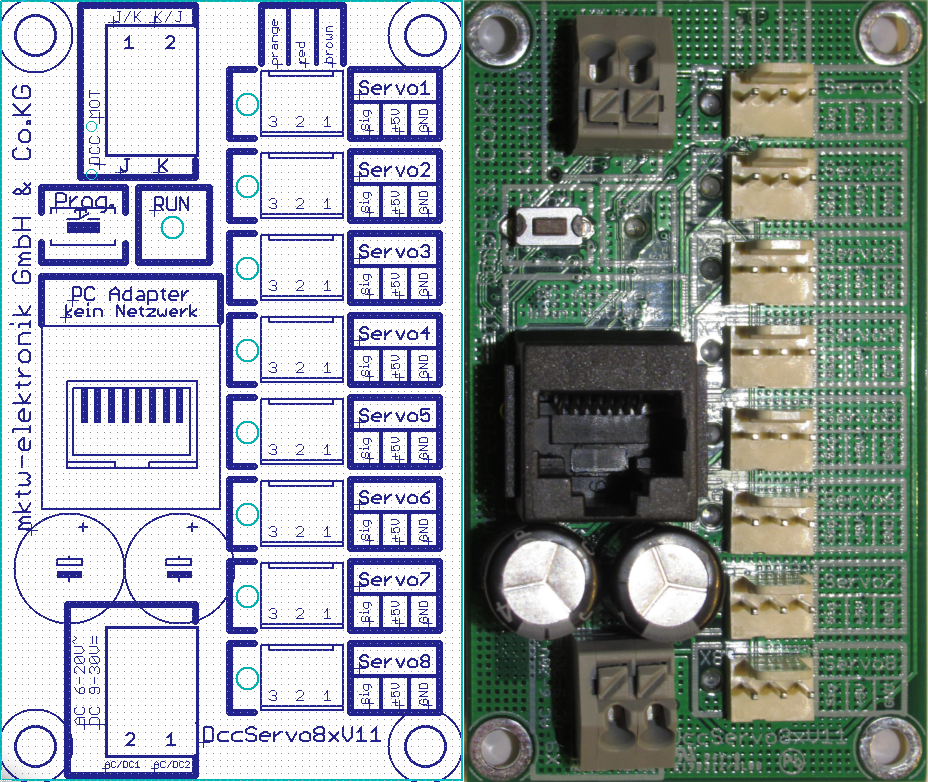
Die Klemmen J, K werden an den Gleisklemmen einer DCC/MM-Digitalzentrale angeschlossen. Die Polarität spielt hier keine Rolle. Der Anschluss des Decoders an die Gleich- oder Wechselspannung Stromversorgung erfolgt über die Klemmverbindung AC1 und AC2, gemäß Abbildung 2: Anschlussbeispiel DCCServodecoder8x. Eine Versorgung mit der Gleisspannung ist natürlich auch möglich, da der Digitalstrom aber oft „knapp und teuer“ ist, ist eine Versorgung durch eine andere Quelle zu empfehlen. Zum Anschluss der Servos sind 8 x 3-polige Steckerleisten zum Anschluss der Motoren vorgesehen. Die Belegung der Steckerleisten 5 V – mittig, Masse – an der Platinenausenkante, Steuersignal – Platinenmitte.
Inbetriebnahme
Verbinden Sie das MultiServo8x mit der Versorgungspannung und Gleisspannung (J, K). Schalten Sie das System ein. Die RUN-LED blinken nun einmal pro Sekunde kurz.
| Status der LED | Bedeutung |
| RUN-LED blink langsam | Modul befindet sich in RUN, Gleissignal ist nicht vorhanden |
| RUN-LED blitzt 1x pro Sekunde kurz | Modul befindet sich in RUN, MM-Signal ist vorhanden |
| RUN-LED blitzt 2x pro Sekunde kurz | Modul befindet sich in RUN, DCC-Signal ist vorhanden |
| RUN-LED blinkt gleichmäßig langsam | Modul ist mit PC-Online und kann über PC konfiguriert werden |
| RUN-LED blinkt gleichmäßig sehr schnell | Programmiermodus |
Einstellung der Adressen, Laufzeiten und Geschwindigkeiten
Die Einstellung der Adressen des Moduls kann über den PC oder die Digitalzentrale vorgenommen werden.
Einstellung der Adressen, Geschwindigkeit und Zeiten über die Zentrale
Die Decoder müssen richtig angeschlossen und in Betrieb sein. Die Verbindung zur Gleisspannung J, K muss ebenfalls hergestellt sein. Die RUN-LED auf dem Decoder blinkt 1x pro Sekunde kurz. Drücken Sie die Taste 1 (Microtaster neben der RUN-LED auf dem Decoder) ca. 3s – nun blinkt die RUN-LED 2x pro Sekunde kurz und zeigt die Bereitschaft zur Programmierung an. Alle Ausgangs-LEDs erlöschen dauerhaft. Die LED des aktuell angewählten einzustellenden Servo blinkt langsam.
Hinweis: Soll ein Schritt übersprungen werden, weil keine Änderung erforderlich ist, dann kurz den Taster betätigen, so gelangt man ins Folgemenü.
Menüfolge:
LED Port 1 blinkt langsam:
Lösen Sie nun einen Schaltvorgang der Weichenadresse aus, auf welche dieser Port eingestellt werden soll. Quittiert wird die Übernahme der Adresse mit dem Wechsel ins nächste Menu.
LED Port 1 blinkt 1x pro Sekunde kurz:
Der Servo fährt die Position für Endstellung an.
Nun kann die Position für die Endstellung mittels +/- Taste für diesen Servo eingestellt werden. Mit jedem Tastendruck wird der Wert um 1% verringert bzw. erhöht. Der Decoder reagiert nur auf die +/- Taste in Verbindung mit Weichen stellen. Die benutzte Adresse ist an dieser Stelle egal. Hält man die Taste gedrückt wird der Wert alle 0,5 Sekunden um 1 verringert bzw. erhöht. Wenn die Position eingestellt ist drücken Sie den Taster erneut kurz.
LED Port 1 blinkt 2x pro Sekunde kurz:
Der Servo fährt die Position für Grundstellung an.
Einstellung der Position für die Grundstellung kann mittels +/- Taste für diesen Servo vorgenommen werden. Mit jedem Tastendruck wird der Wert um 1% verringert bzw. erhöht. Wenn die Position eingestellt ist drücken Sie den Taster erneut kurz.
LED Port 1 erlischt 1x pro Sekunde kurz:
Der Servo fährt die Position in den aktuellen Geschwindigkeitsvorgaben zyklisch an.
Einstellung der Fahrzeit von Grundposition zur Endposition wird vorgenommen. Die Standardeinstellung beträgt 200 ms. Mit jedem Tastendruck wird der Wert um 100 ms verringert bzw. erhöht. 0 bedeutet, der Motor fährt mit maximaler Geschwindigkeit. Wenn die Geschwindigkeit eingestellt ist drücken Sie den Taster erneut kurz.
LED Port 1 erlischt 2x pro Sekunde kurz:
Der Servo fährt die Position in den aktuellen Geschwindigkeitsvorgaben zyklisch an.
Einstellung der Fahrzeit von Endposition zur Grundposition wird vorgenommen. Die Standardeinstellung beträgt 200 ms. Mit jedem Tastendruck wird der Wert um 100 ms verringert bzw. erhöht. 0 bedeutet, der Motor fährt mit maximaler Geschwindigkeit. Wenn die Geschwindigkeit eingestellt ist drücken Sie den Taster erneut kurz.
…
…
…
LED Port 8 blinkt langsam – Adresse für Port 8 wird eingestellt,
LED Port 8 blinkt 1x pro Sekunde kurz:
LED Port 8 blinkt 2x pro Sekunde kurz:
LED Port 8 erlischt 1x pro Sekunde kurz:
LED Port 8 erlischt 2x pro Sekunde kurz:
Soll der Wert des aktuellen Menüs nicht verändert werden, dann kurz die Taste einmal betätigen. So gelangt man ohne Änderung zum nächsten Menüpunkt. Hält man die Taste am Decoder wieder 3 Sekunden, wird der Programmiermodus unabhängig vom derzeitigen Menü verlassen.
Sollen mehrere Ports eingestellt werden, wiederholen Sie diesen Vorgang bitte.
Eine feinere Einstellung der Ansteuerzeiten (z. B. 245ms) ist nur mit der PC Software möglich. Außerdem ist über die PC Software eine Starteinstellung programmierbar, falls der Decoder beim Einschalten immer einen Position fest ansteuern soll. Die ist in der Regel nur sehr selten notwendig.
Einstellung der Adressen über den PC
Laden Sie sich die Programmiersoftware RailSoftControl auf der Page www.mktw-Elektronik.de herunter und installieren Sie das Programm.
Starten Sie das Programm RailSoftControl auf einem PC und verbinden Sie den Decoder mittels RS232-Adapter mit Ihrem PC.
Konfigurieren Sie in der Software den Comport. Gehen Sie hierzu auf Einstellungen>Schnittstelle und stellen Sie den entsprechenden Port ein. Die Baudrate muss auf 19200 Baud eingestellt werden.
Bedienung der Software
Mittels eines Treibers wird die Verbindung zum Decoder aufgebaut. Die Einstellung der Parameter können so vorgenommen werden.
Jedem Modul, jedem Ausgangsport kann ein Name und Infotext zugeordnet werden. Diese werden in einer XML-Datei bzw. auf dem Modul gespeichert. Erkannt werden diese über die eindeutige Seriennummer der Module. Diese Eingaben sind für den Betrieb nicht zwingend notwendig. Sie dienen lediglich dafür, um die Module am Bus leichter zu identifizieren. Denn sucht man die Pläne und Aufzeichnungen, sind diese ja meist nicht zu finden.
Die Einstellungen der Adressen und Signalzeiten werden im Flash eines jeden Moduls gespeichert. Haben Sie die Anpassungen vorgenommen müssen diese gespeichert werden. Drücken Sie hierzu den Button „Speichern“!
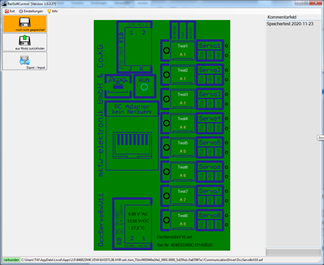
In der Hauptoberfläche können die Texte, Adressen und das Verhalten beim Einschalten des Modul eingestellt werden. Wichtige Statusinformationen z. B. Spannung, Temperatur des Modul und Anzahl der Steuersignale (Weichensignale) von der Zentrale werden hier angezeigt.
Mit einem Mausklick auf die jeweilige Klemme eines Servos erhält man Zugriff auf weitere Parameter zur Servo-Konfiguration.
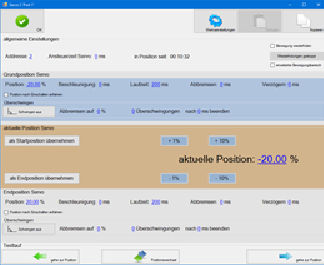
Einstellung Servo-Grund- oder Endposition
Hinweis: Die folgenden Werte können nur über unsere kostenlose Software „RailSoftControl“ in Verbindung eines RS232=>USB Wandler verändert werden.
- Mausklick auf „Position“: Einstellung der Grundposition in Prozent
(-100%..+100%)
Der Wert ist bezogen auf die Standardsteuerzeit des Servos. Das bedeutet: Mit -100% wird der Servo die linke Endstellung und mit +100% die rechte Entstellung anfahren. Mit 0 steht der Servo in der Mitte (Neutralstellung).
Bei den meisten Miniantrieben entspricht das einem Bewegungswinkel von ca. 90°. - Mausklick auf „Verzögern“: Zeit in Millisekunden (0 ..65535 ms) die vergehen soll, von Steuersignal bis zur Ausführung. (Standardeinstellung 0, das bedeutet der Befehl wird sofort ausgeführt) Benötigt wird dieser Parameter z. B. bei der Steuerung von Schranken, um die linke oder rechte Schranke etwas zu verzögern, da sich im Normalfall nie beide Schranken synchron bewegen.
- Mausklick auf „Beschleunigen“, „Laufzeit“ und „Abbremsen“ wird eine Zeit zwischen 0..65535 ms eingestellt.
Eine Bewegung besteht immer aus Beschleunigen, Lauf und Abbremsen. In den meisten Fällen arbeitet man nur über die Laufzeit. Die Zeit für Beschleunigung und Bremsen ist meist 0.
Beispiel 1
Laufzeit = 1000 ms: Die Bewegung von Grundposition zur Endposition dauert exakt 1000 ms.
Laufzeit = 0 ms: Die Bewegung von Grundposition zur Endposition wird mit maximaler Geschwindigkeit ausführen.
Beispiel 2
Beschleunigen 1000 ms, Laufzeit 1000 ms, Abbremsen 1000 ms. Die Dauer des gesamten Stellvorgangs beträgt 3000 ms. Zuerst wird der Motor gleichmäßig beschleunigt, läuft dann 1000 ms mit errechneter Geschwindigkeit und wird anschließend 1000 ms gleichmäßig gebremst.
Vorausgesetzt wird bei diesen Beispielen, dass der Servo die technischen Voraussetzungen aufweist, entsprechende Parameter zu erfüllen.
- Kontrollkästchen „Position nach Einschalten anfahren“: Ist dieser Haken gesetzt, wird nach Spannungswiederkehr (Einschalten) diese Position angefahren. Hier kann der Haken entweder für die Grund- oder Endposition gesetzt werden.
- Auswahlfeld „Schwingen“: Hier stehen 3 Auswahlmöglichkeiten.
- Schwingen aus: Motor stoppt sofort nach Erreichen der Position.
Die Werte: „Abbremsen auf“, „Überschwingungen“ und „nach x ms beenden“ haben dann keine Wirkung. - Nachwippen: Voraussetzung ist hier der Wert für Abbremsen=0.
Der Motor wird auf den Wert „Abbremsen auf x %“ der aktuellen Geschwindigkeit gebremst und schwingt gleichmäßig um die Sollposition nach. Die Anzahl wird vom Wert „Überschwingungen“ bestimmt. Nach der Zeit „nach x ms beenden“ ist das Nachwippen abgeschlossen. (Wird häufig bei Anwendungen ohne Endanschlag benutzt. (Z. B. wenn Flügelsignale bewegt werden oder Schranken in die geöffnete Position fahren) - „Rückschwingen“ Voraussetzung ist hier der Wert für Abbremsen=0.
Der Motor wird auf den Wert „Abbremsen auf x %“ der aktuellen Geschwindigkeit gebremst und schwingt jedoch sofort zurück, ohne die Endposition zu überfahren. Die Anzahl wird über „Schwingungen“ bestimmt. Nach der Zeit „nach x ms beenden“ ist das Rückschwingen abgeschlossen. (Wird bei Anwendungen mit Endanschlag benutzt. (Z. B. wenn Schranken in die geschlossene Position fahren, denn Schranken biegen sich nicht nach unten durch.)
Rezensionen
Es gibt noch keine Rezensionen.